ELEC1100, Introduction to Electro-Robot Design (L3), Fall 2019, HKUST
Instructor: Professor Qiming SHAO
Instructional Assistants: Yimeng Tang and Fox WU
Technical Officers: Allen NG and Joseph CHENG
Lecture section: 2:00 -2:50 pm Wednesday, Friday, Room 2306
Office hours: by appointment
Teaching (learning) philosophy: “I hear and I forget. I see and I remember. I do and I understand.”
-- attributed to Kong Fuzi…Confucius (551 – 479 BCE)
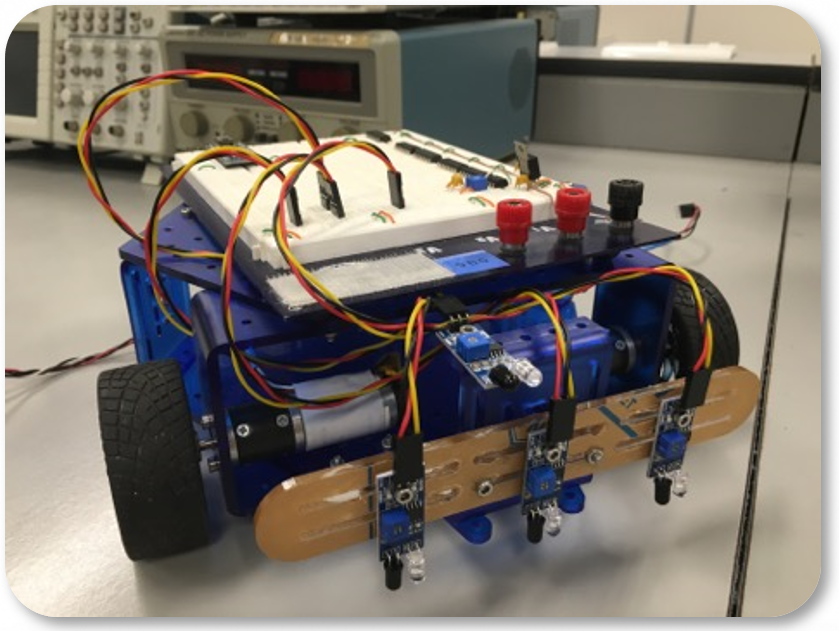
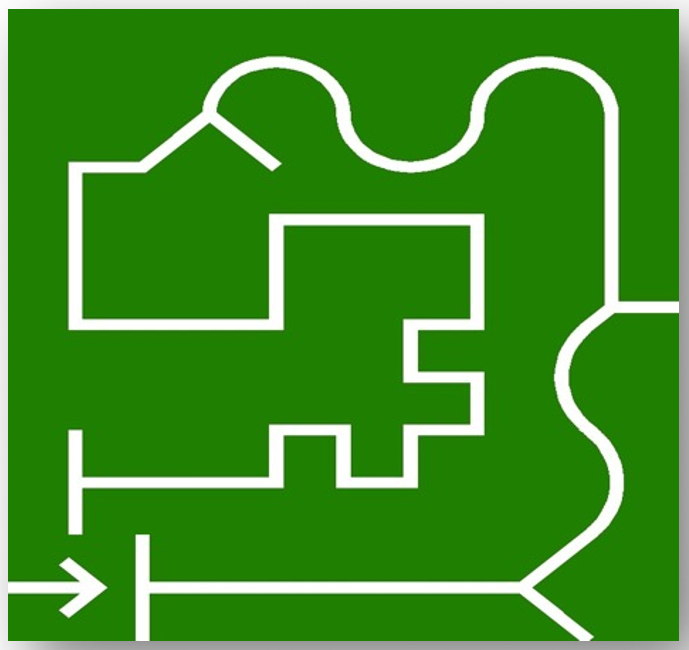
Final project: a robot car that can automatically track white lines on a map
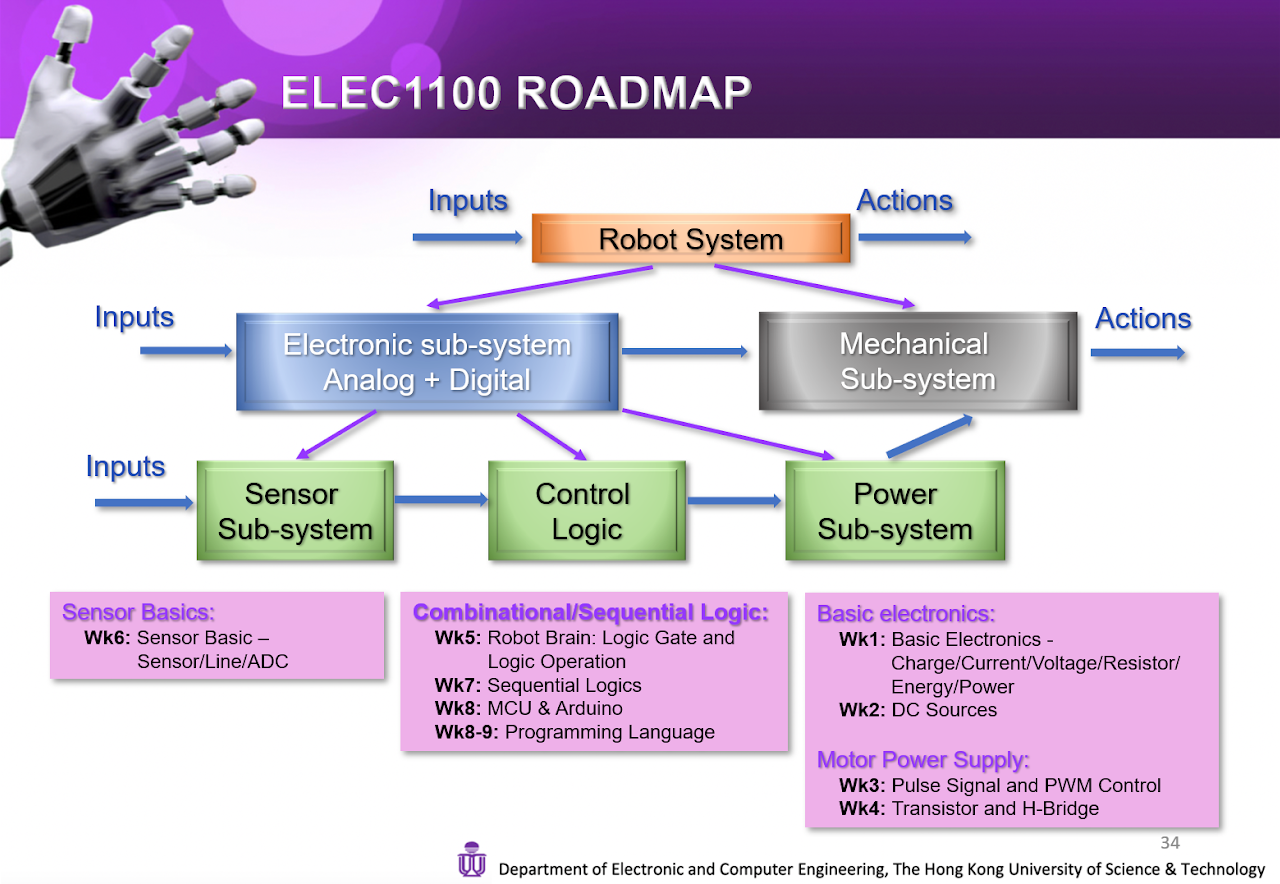
Key concepts:
lecture 1: robot, types of robot, hierarchical design
lecture 2: charge, electron, current, voltage, resistor, ohm's law
lecture 3: energy, power, resistors in parallel and in series
lecture 4: battery, regulator, diode, Zener diode
lecture 5: electric motor, pulse characteristics, average voltage and power, equivalent voltage, integrated circuit, timer, variable resistor, waveform rectifier (Schmitt trigger, inverter)
lecture 6: pulse width modulation, binary number, counter, comparator
lecture 7: bipolar junction transistor (pnp and pnp), switch, circuit example: light activated switch
lecture 8: transistor as a switch or amplifier, H-bridge circuit
lecture 9: Kirchhoff's current law (KCL), Kirchhoff's voltage law (KVL)
lecture 10: logic gate and logic operation
lecture 11: sensors, line sensor, ADC, lab midterm review
lecture 12: combinational logic and K-map
lecture 13: adder, sequential logic, edge-triggered and transparent flip-flop
lecture 14: written exam review
lecture 15: micro-controller and Arduino
lecture 16: programming language - introduction, functions
lecture 17: programming language - variables, structure
lecture 18: final project - robot car